Friction torque, abbreviated as \(\tau_f\), is the resistance to rotation experienced by a rotating object due to frictional forces between its components. When an object rotates, there is often contact between moving parts, such as bearings or gears, which results in friction. This friction opposes the motion and generates a torque that acts to slow down or resist the rotation of the object.
Friction Torque Formula |
||
|
\( \tau_f \;=\; F_n \cdot \mu \cdot r \) (Friction Force) \( F_n \;=\; \dfrac{ \tau_f }{ \mu \cdot r }\) \( \mu \;=\; \dfrac{\tau_f }{ F_n \cdot r }\) \( r \;=\; \dfrac{ \tau_f }{ F_n\cdot \mu }\) |
||
| Symbol | English | Metric |
| \( \tau_f \) (Greek symbol tau) = Friction Torque | \(lbf-ft\) | \(N-m\) |
| \( F_n \) = Normal Force Pressing the Surfaces Togeather | \( lbf \) | \( N \) |
| \( \mu \) (Greek symbol mu) = Friction Coefficient | \(dimensionless \) | \(dimensionless \) |
| \( r \) = Effective Radius at which the Friction Force Acts | \(in\) | \(mm\) |
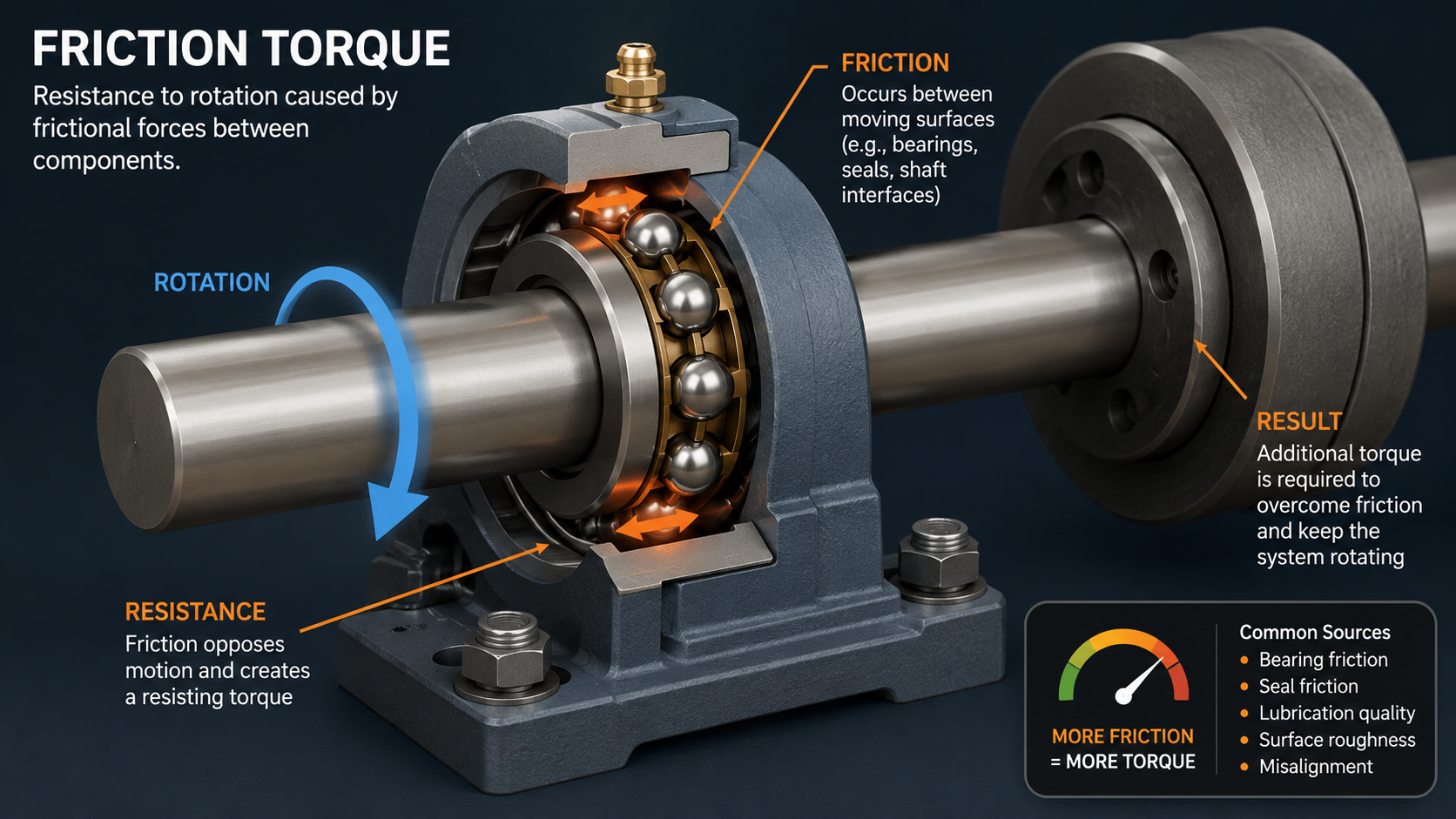
Friction torque can be caused by various factors, including surface roughness, lubrication conditions, and the materials involved. Reducing friction torque is important in many mechanical systems to improve efficiency and performance. This can be achieved through various means, such as using lubricants to reduce friction between surfaces, optimizing surface finishes, or using bearings with low friction coefficients.
It's important to note that this formula assumes that the friction force is static and does not vary with velocity. In reality, friction can be more complex, especially in dynamic situations where velocity and other factors come into play. Additionally, this formula assumes a simple situation where the coefficient of friction is constant and does not change with factors such as temperature or surface condition.
![]()