Radius of Gyration of a Zed formulas |
||
|
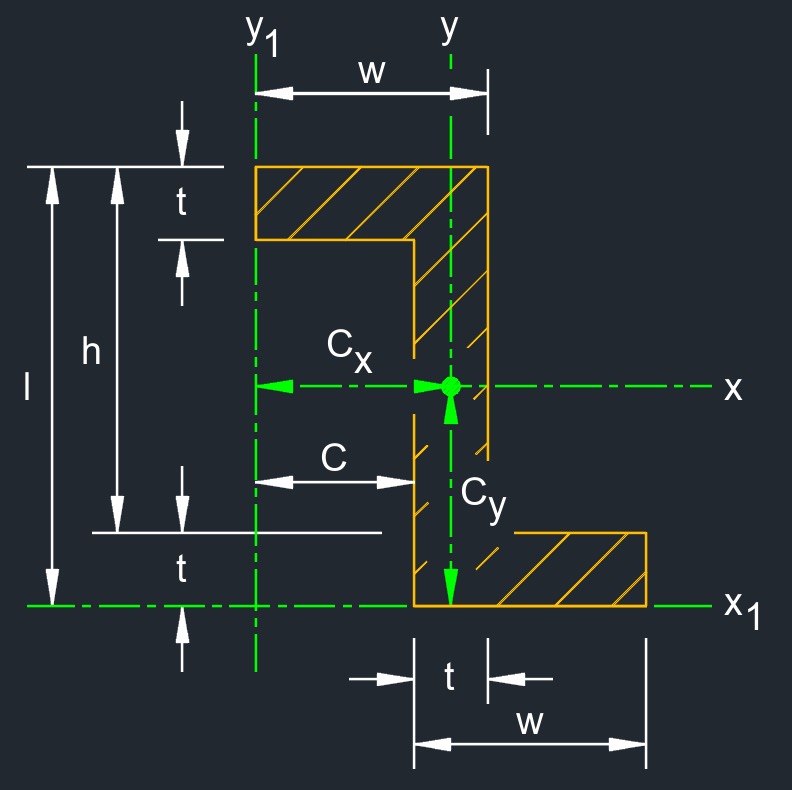
\( k_{x} \;=\; \sqrt{ \dfrac{ w\cdot l^3 - c \cdot \left( l - 2\cdot t \right)^3 }{ 12\cdot t \cdot \left[ l + 2 \cdot \left( w - t \right) \right] } } \) \( k_{y} \;=\; \dfrac{l \cdot \left( w + c \right)^3 - 2c^3 \cdot h - 6\cdot w^2\cdot c\cdot h }{ 12\cdot t \cdot \left[ l + 2 \cdot \left( w - t \right) \right] } \) \( k_{z} \;=\; \sqrt{ k_{x}{^2} + k_{y}{^2} } \) \( k_{x1} \;=\; \sqrt{ \dfrac{ I_{x1} }{ A } } \) \( k_{y1} \;=\; \sqrt{ \dfrac{ I_{y1} }{ A } } \) \( k_{z1} \;=\; \sqrt{ k_{x1}{^2} + k_{y1}{^2} } \) |
||
| Symbol | English | Metric |
| \( k \) = radius of gyration | \( in \) | \( mm \) |
| \( A \) = area | \( in^2 \) | \( mm^2 \) |
| \( h \) = height | \( in \) | \( mm \) |
| \( l \) = height | \( in \) | \( mm \) |
| \( I \) = moment of inertia | \( in^4 \) | \( mm^4 \) |
| \( t \) = thickness | \( in \) | \( mm \) |
| \( c \) = width | \( in \) | \( mm \) |
| \( w \) = width | \( in \) | \( mm \) |
![]()